在消費(fèi)類電子產(chǎn)品和汽車汽配等行業(yè)的生產(chǎn)工藝中,涂膠質(zhì)量直接影響到產(chǎn)品的使用壽命和安全性,而傳統(tǒng)的2D視覺無法對(duì)涂膠高度進(jìn)行檢測(cè)。因此,引入3D視覺來彌補(bǔ)這一短板,不僅能夠基于多個(gè)工藝標(biāo)準(zhǔn)對(duì)涂膠質(zhì)量進(jìn)行檢測(cè),更能夠?yàn)槠髽I(yè)提供可靠的質(zhì)量管控保障。

3D激光輪廓傳感器基于激光三角測(cè)量原理,通過硬件內(nèi)置的高精度3D算法,實(shí)時(shí)輸出高幀率、微米級(jí)精度的點(diǎn)云數(shù)據(jù)、深度圖和亮度圖數(shù)據(jù)。海康機(jī)器人提供的膠路檢測(cè)方案, 廣泛適用于3C行業(yè)、汽配行業(yè)中的涂膠檢測(cè)場(chǎng)景。
3C行業(yè)膠路檢測(cè)
需求背景
檢測(cè)手機(jī)中框點(diǎn)膠質(zhì)量,包括膠寬、膠高、斷膠及塌膠、爬墻和掉膠
行業(yè)痛點(diǎn)
傳統(tǒng)檢測(cè)方式效率低,誤判漏判斷嚴(yán)重
傳統(tǒng)2D視覺無法兼容多種檢測(cè)需求,例如膠高檢測(cè)和塌膠檢測(cè)
檢測(cè)難點(diǎn)
膠路不規(guī)則,拐角處成像易出現(xiàn)噪點(diǎn)
需要把手機(jī)框側(cè)壁與膠路做精準(zhǔn)區(qū)分
產(chǎn)線速度快,對(duì)相機(jī)幀率要求高
方案構(gòu)成
MV-DP3020-01P

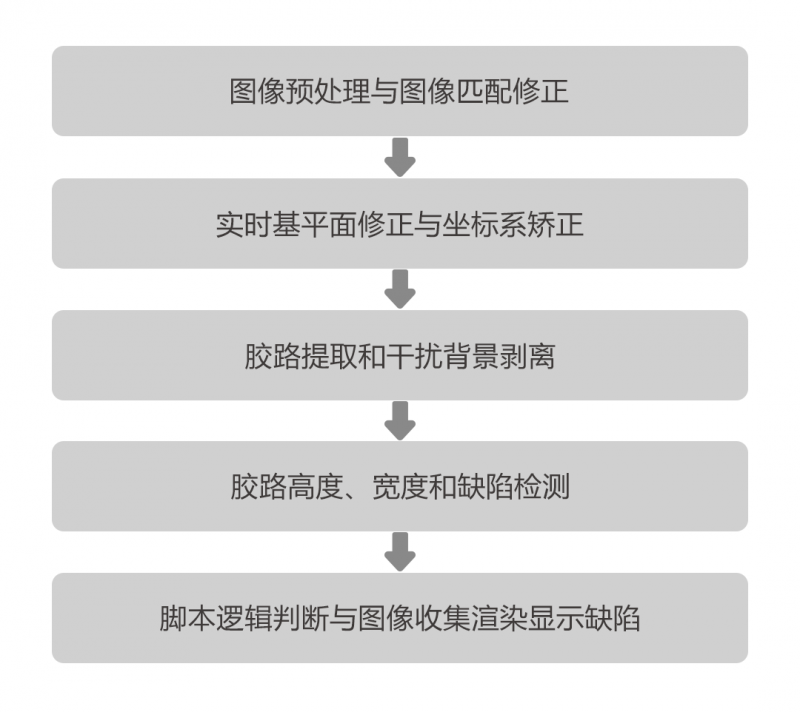
VM 3D算法流程
檢測(cè)效果' fill='%23FFFFFF'%3E%3Crect x='249' y='126' width='1' height='1'%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
膠寬重復(fù)性精度<0.05mm
膠高重復(fù)性精度<0.02mm
過殺率<0.1%
漏檢率<0.01%
速度達(dá)200mm/s

汽車行業(yè)膠路檢測(cè)
需求背景
檢測(cè)汽車配件涂膠膠路高度、寬度、缺膠、斷膠
行業(yè)痛點(diǎn)
傳統(tǒng)2D視覺均無法檢測(cè)膠路高度
傳統(tǒng)檢測(cè)方式效率低,易漏檢
檢測(cè)難點(diǎn)
同時(shí)檢測(cè)多條膠路,相機(jī)視野要求大,精度要求高
節(jié)拍要求快
方案構(gòu)成
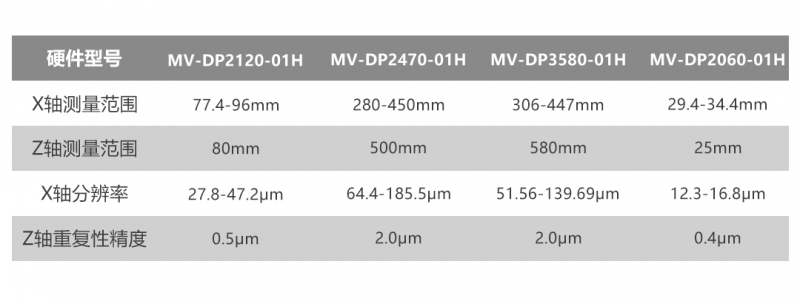
MV-DP2120/DP2470/DP3580/DP2060-01H
VM 3D算法流程
檢測(cè)效果
膠寬重復(fù)性精度<0.5mm
膠高重復(fù)性精度<0.2mm
過殺率<0.1%
漏檢率<0.01%

膠體的體積測(cè)量
需求背景
檢測(cè)助焊劑體積
行業(yè)痛點(diǎn)
2D視覺無法檢測(cè)助焊劑體積
檢測(cè)難點(diǎn)
助焊劑不規(guī)則,檢測(cè)體積對(duì)成像及算法有較高要求
方案構(gòu)成
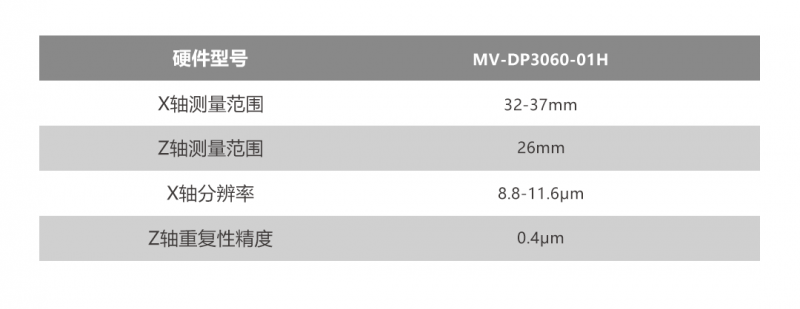
MV-DP3060-01H
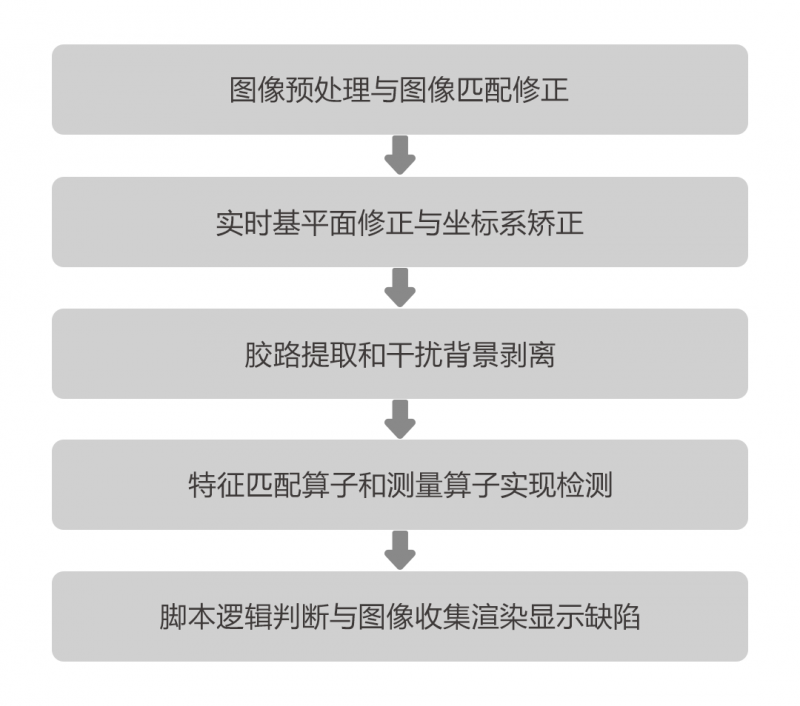
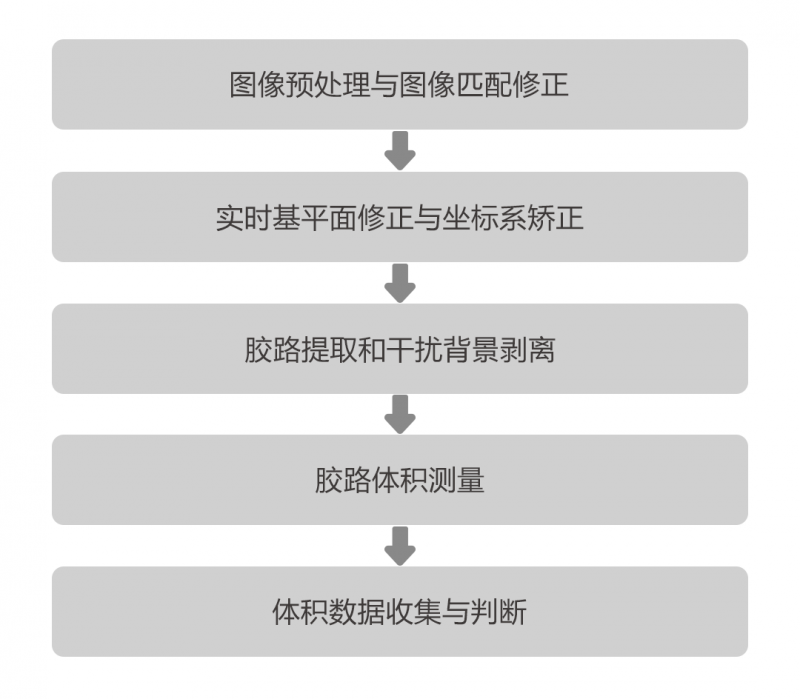
VM 3D算法流程
檢測(cè)效果
助焊劑體積重復(fù)性精度<0.3mm³

3D視覺檢測(cè)技術(shù)相較于傳統(tǒng)的2D檢測(cè)方式,在膠路檢測(cè)中的準(zhǔn)確性和效率方面獲得了極大的提升。海康機(jī)器人提供的基于3D激光輪廓傳感器的膠路檢測(cè)方案,有效提高產(chǎn)品質(zhì)量、使用壽命、安全性以及生產(chǎn)效率,提高了企業(yè)的質(zhì)量管控水平,助力企業(yè)轉(zhuǎn)型升級(jí)。
3D激光輪廓傳感器基于激光三角測(cè)量原理,通過硬件內(nèi)置的高精度3D算法,實(shí)時(shí)輸出高幀率、微米級(jí)精度的點(diǎn)云數(shù)據(jù)、深度圖和亮度圖數(shù)據(jù)。海康機(jī)器人提供的膠路檢測(cè)方案, 廣泛適用于3C行業(yè)、汽配行業(yè)中的涂膠檢測(cè)場(chǎng)景。
3C行業(yè)膠路檢測(cè)
需求背景
檢測(cè)手機(jī)中框點(diǎn)膠質(zhì)量,包括膠寬、膠高、斷膠及塌膠、爬墻和掉膠
行業(yè)痛點(diǎn)
傳統(tǒng)檢測(cè)方式效率低,誤判漏判斷嚴(yán)重
傳統(tǒng)2D視覺無法兼容多種檢測(cè)需求,例如膠高檢測(cè)和塌膠檢測(cè)
檢測(cè)難點(diǎn)
膠路不規(guī)則,拐角處成像易出現(xiàn)噪點(diǎn)
需要把手機(jī)框側(cè)壁與膠路做精準(zhǔn)區(qū)分
產(chǎn)線速度快,對(duì)相機(jī)幀率要求高
方案構(gòu)成
MV-DP3020-01P
VM 3D算法流程
檢測(cè)效果
膠寬重復(fù)性精度<0.05mm
膠高重復(fù)性精度<0.02mm
過殺率<0.1%
漏檢率<0.01%
速度達(dá)200mm/s
汽車行業(yè)膠路檢測(cè)
需求背景
檢測(cè)汽車配件涂膠膠路高度、寬度、缺膠、斷膠
行業(yè)痛點(diǎn)
傳統(tǒng)2D視覺均無法檢測(cè)膠路高度
傳統(tǒng)檢測(cè)方式效率低,易漏檢
檢測(cè)難點(diǎn)
同時(shí)檢測(cè)多條膠路,相機(jī)視野要求大,精度要求高
節(jié)拍要求快
方案構(gòu)成
MV-DP2120/DP2470/DP3580/DP2060-01H
VM 3D算法流程
檢測(cè)效果
膠寬重復(fù)性精度<0.5mm
膠高重復(fù)性精度<0.2mm
過殺率<0.1%
漏檢率<0.01%
膠體的體積測(cè)量
需求背景
檢測(cè)助焊劑體積
行業(yè)痛點(diǎn)
2D視覺無法檢測(cè)助焊劑體積
檢測(cè)難點(diǎn)
助焊劑不規(guī)則,檢測(cè)體積對(duì)成像及算法有較高要求
方案構(gòu)成
MV-DP3060-01H
VM 3D算法流程
檢測(cè)效果
助焊劑體積重復(fù)性精度<0.3mm³
3D視覺檢測(cè)技術(shù)相較于傳統(tǒng)的2D檢測(cè)方式,在膠路檢測(cè)中的準(zhǔn)確性和效率方面獲得了極大的提升。海康機(jī)器人提供的基于3D激光輪廓傳感器的膠路檢測(cè)方案,有效提高產(chǎn)品質(zhì)量、使用壽命、安全性以及生產(chǎn)效率,提高了企業(yè)的質(zhì)量管控水平,助力企業(yè)轉(zhuǎn)型升級(jí)。





